Einbettung, euklidisches Skalarprodukt und induzierte Metrik
In den bisherigen Kapiteln haben wir uns mit differenzierbaren
Mannigfaltigkeiten beschäftigt, die neben Tangentialvektoren und
Co-Tangentialvektoren über eine einzige zusätzliche
Struktur verfügten: den affinen Zusammenhang, gegeben durch die
Christoffelsymbole. Auf diese Weise konnten wir Begriffe wie
die Veränderung von Vektorfeldern (kovariante Ableitung),
Paralleltransport, gerade (geodätische) Linien, parallele Linien
sowie Torsion und Krümmung definieren.
Die Art von Geometrie, die man damit betreiben kann, bezeichnet man
als affine Geometrie. Die Begriffe Abstand und Winkel
kommen in der affinen Geometrie nicht vor.
Um Abstände und Winkel auf Mannigfaltigkeiten definieren zu können,
brauchen wir eine andere zusätzliche Struktur: die Metrik.
Wie in den vorhergehenden Kapiteln wollen wir uns bei der Definition der Metrik wieder von
unserer Anschauung leiten lassen, indem wir uns Mannigfaltigkeiten
eingebettet im n-dimensionalen reellen euklidischen Raum \( \mathbb{R}^{n} \) vorstellen,
beispielsweise als zweidimensionale (gekrümmte) Flächen im dreidimensionalen
Raum.
Im \( \mathbb{R}^{n} \) sind Abstände und Winkel über das euklidische Skalarprodukt
definiert. Das euklidische Skalarprodukt
\(
\langle
\boldsymbol{X}, \boldsymbol{Y}
\rangle
\)
zweier Vektoren \( \boldsymbol{X} \) und \( \boldsymbol{Y} \)
aus \( \mathbb{R}^{n} \) ist dabei gegeben durch
euklidische Skalarprodukt im \( \mathbb{R}^{n} \):
Dabei sind \( X^{ i} \) und \( Y^{ i} \) die Komponenten der Vektoren
\( \boldsymbol{X} \) und \( \boldsymbol{Y} \)
(den Index habe ich – wie in der Relativitätstheorie üblich –
oben geschrieben). Aus der Definition geht hervor, dass das Skalarprodukt
bilinear in den beiden Argumenten ist.
Die Länge \( |\boldsymbol{X}| \) eines Vektors \( \boldsymbol{X} \) aus \( \mathbb{R}^{n} \) ist nun
definiert als
\[
|\boldsymbol{X}| := \sqrt{
\langle
\boldsymbol{X}, \boldsymbol{X}
\rangle
}
\]
was dem Satz des Pythagoras entspricht. Der Winkel \( \alpha \) zwischen zwei Vektoren
\( \boldsymbol{X} \) und \( \boldsymbol{Y} \) aus \( \mathbb{R}^{n} \) ist wiederum
definiert über
\[
\langle
\boldsymbol{X}, \boldsymbol{Y}
\rangle
=:
|\boldsymbol{X}| \, |\boldsymbol{Y}| \, \cos{\alpha}
\]
Wem diese Definition des Winkels merkwürdig vorkommt:
Man kann auch umgekehrt das Skalarprodukt
über die obige Formel definieren,
wobei man von einer anschaulichen Winkeldefinition ausgeht, d.h. die Winkelfunktionen
erfüllen die üblichen Rechenregeln (Additionstheoreme etc.).
Es folgt, dass das so definierte Skalarprodukt bilinear ist, so dass
man die obige Komponenten-Summenformel reproduzieren kann
(den Beweis für die Gleichwertigkeit der beiden Darstellungsweisen
für das Skalarprodukt findet man beispielsweise in
Wikipedia: Dot product).
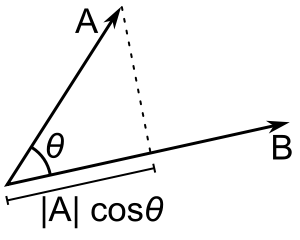
Skalarprodukt zweier Vektoren A und B.
Der Vektor A wird senkrecht auf den Vektor B
projeziert und die Länge dieser Projektion (ggf. mit Vorzeichen gemäß
\( \cos{\theta} \) ) anschließend mit der Länge von B multipliziert,
um das Skalarprodukt zu ermitteln.
Quelle:
Wikimedia Commons File:Dot Product.svg, public domain
Schauen wir uns nun an, wie sich das obige Skalarprodukt auf einen
Tangentialraum \(T(p)\) im Punkt p einer im \(\mathbb{R}^{n}\) eingebetteten Mannigfaltigkeit \(M\)
übertragen lässt. Dazu eine kurze Wiederholung (siehe Kapitel 5.1.4
Tangentialräume und Vektorfelder):
Bei einer in \( \mathbb{R}^{n} \) eingebetteten m-dimensionalen Mannigfaltigkeit \(M\)
können wir jeden ihrer Punkte \(p\)
durch einen n-dimensionalen Vektor \(\boldsymbol{X}(x)\) im Einbettungsraum \(\mathbb{R}^{n}\)
darstellen. Dabei sind
\[
x =
\begin{pmatrix}
x^1 \\
... \\
x^m
\end{pmatrix}
\]
m Koordinaten des Punktes p, d.h. es ist
\[
x = f(p)
\]
mit der Koordinatenfunktion (Karte) \(f\).
Man sagt auch, \(\boldsymbol{X}(x)\) liefert eine Parametrisierung der Mannigfaltigkeit \(M\)
(oder zumindest von Teilen davon) im
Einbettungsraum \(\mathbb{R}^{n}\). Wegen
\[
p = \boldsymbol{X}(x)
\]
und umgekehrt
\[
x = f(p)
\]
ist \( \boldsymbol{X} \) die Umkehrfunktion zur Koordinatenfunktion \(f\),
d.h.
\[
p = \boldsymbol{X}(x) = f^{-1}(x)
\]
Einen Tangentialvektor \(u(p)\) aus \(T(p)\) können wir aufgrund der Einbettung und
der Parametrisierung von \(M\) nun schreiben als
\[
u(p) = \sum_{\mu = 1}^m \,
u^{\mu}(p) \, \frac{\partial \boldsymbol{X}(x)}{\partial x^{\mu}}
\]
mit \( x = f(p) \).
Der Vektor \(u(p)\) ist demnach ein
Vektor in \(\mathbb{R}^{n}\), der in \(p\) tangential zur Fläche \(M\) liegt.
Die Vektoren
\[
\frac{\partial \boldsymbol{X}(x)}{\partial x^{\mu}}
\]
bilden
eine koordinatenabhängige Basis des Tangentialraums.
Wir können nun das Skalarprodukt des \( \mathbb{R}^{n} \) auf den
Tangentialraum \(T(p)\) übertragen und eine Metrik \( g(u(p), v(p)) \)
auf \(T(p)\) definieren:
Definition einer Metrik auf \(M\), eingebettet in \(R^{n}\):
Für zwei Tangentialvektoren \(u(p)\) und \(v(p)\) aus \(T(p)\) definieren wir
die Metrik \( g(u(p), v(p)) \) als
\[
g(u(p), v(p)) :=
\langle
u(p), v(p)
\rangle
\]
Dabei sind auf der rechten Seite aufgrund der Einbettung \(u(p)\) und \(v(p)\) als Vektoren
im \(\mathbb{R}^{n}\) zu lesen, so dass das euklidische Skalarprodukt
zwischen ihnen definiert ist. Mit
\[
u(p) = \sum_{\mu = 1}^m \,
u^{\mu}(p) \, \frac{\partial \boldsymbol{X}(x)}{\partial x^{\mu}}
\]
\[
v(p) = \sum_{\nu = 1}^m \,
v^{\mu}(p) \, \frac{\partial \boldsymbol{X}(x)}{\partial x^{\nu}}
\]
können wir aufgrund der Bilinearität des Skalarproduktes
schreiben:
\[
g(u(p), v(p)) =
\]
\[ =
\sum_{\mu\nu} \,
u^{\mu}(p) \, v^{\nu}(p)
\, g_{\mu\nu}(p)
\]
mit
\[
g_{\mu\nu}(p) :=
\left\langle
\frac{\partial \boldsymbol{X}(x)}{\partial x^{\mu}}, \frac{\partial \boldsymbol{X}(x)}{\partial x^{\nu}}
\right\rangle
\]
Aus der Definition geht direkt hervor, dass \( g(u(p), v(p)) \)
alle Eigenschaften des euklidischen Skalarproduktes erbt, d.h.
die Metrik ist symmetrisch und bilinear in \(u\) und \(v\).
Weiterhin ist sie positiv definit, d.h.
\(
g(u(p), u(p)) \gt 0 \) wenn \(u(p)\) nicht der Nullvektor ist
(andernfalls ist \( g(0, 0) = 0 \)).
Man kann nun mit Hilfe der Metrik wieder die Länge eines Tangentialvektors
und den Winkel zwischen zwei Tangentialvektoren definieren.
Dabei übertragen wir die Definition vom euklidischen Skalarprodukt
unmittelbar auf die Metrik, d.h. es ist
\begin{align}
|u(p)| &:= \sqrt{ g(u(p), u(p)) } = \\
&= \sqrt{
\langle
u(p), u(p)
\rangle } \\ & \\
g(u(p), v(p)) &=
\langle
u(p), v(p)
\rangle = \\
&=: |u(p)| \, |v(p)| \, \cos{\alpha}
\end{align}
Die Länge von Tangentialvektoren können wir weiterhin dazu verwenden,
um die Länge von Kurven auf der Mannigfaltigkeit zu definieren.
Stellen wir uns dazu die Mannigfaltigkeit \(M\) wieder eingebettet
im \(\mathbb{R}^{n}\) vor. Auf \(M\) soll nun eine (differenzierbare)
Kurve \( \gamma(t) \)
verlaufen, d.h. für jeden reellen Kurvenparameter \(t\) ist \( \gamma(t) \)
ein Punkt auf \(M\).
Wir starten nun mit einem Punkt \( \gamma(t) \) auf \(M\) und bewegen uns
ein winziges Stück auf der Kurve weiter, indem wir den Kurvenparameter um einen
sehr kleinen Wert \(dt\) erhöhen. Der Nachbarpunkt lautet dann \( \gamma(t + dt) \).
Aufgrund der Einbettung können wir den Abstand zwischen diesen beiden Punkten
ausrechnen:
\[
| \gamma(t + dt) - \gamma(t) |
\]
Für sehr kleine \(dt\) ist dieser Abstand anschaulich gleich der Länge des Kurvenstücks
zwischen den beiden Punkten. Wir können \(dt\) nämlich so klein machen, dass die Kurve
zwischen den beiden Punkten wie eine gerade Linie aussieht (genauer: das geht,
da wir die Differenzierbarkeit der Kurve voraussetzen, d.h. die Kurve
hat keine Knicke). Weiterhin gilt für sehr kleine \(dt\):
\[
| \gamma(t + dt) - \gamma(t) | =
\bigg| \frac{d}{dt} \gamma(t) \bigg| \, dt
\]
Um die Gesamtlänge der Kurve zwischen zwei Punkten \(\gamma(a)\) und \(\gamma(b)\)
zu definieren, müssen wir nun die Kurve dazwischen in sehr viele sehr kleine Stücke
zerteilen und die Längen dieser Teilstücke aufsummieren.
Im Grenzübergang unendlich vieler unendlich kleiner Teilstücke ergibt dies ein Integral
für die Länge \(L(\gamma,a,b)\) der Kurve zwischen \(\gamma(a)\) und \(\gamma(b)\):
\[
L(\gamma,a,b) := \int_{a}^{b} \,
\bigg| \frac{d}{dt} \gamma(t) \bigg| \, dt
\]
Da \( \frac{d}{dt} \gamma(t) \) ein Tangentialvektor im Punkt \(\gamma(t)\) ist,
können wir diesen Ausdruck mit Hilfe der Metrik umschreiben als
\[
L(\gamma,a,b) := \]
\[ = \int_{a}^{b} \,
\sqrt{ g \left( \frac{d}{dt} \gamma(t), \frac{d}{dt} \gamma(t) \right) } \, dt
\]
Wichtig ist dabei, \( L(\gamma,a,b) \) nicht von der Parametrisierung der Kurve abhängt
(also nicht davon abhängt, mit welcher Geschwindigkeit die Kurve durchlaufen wird).
Die Metrik erlaubt es uns also, die Länge einer Kurve auf \(M\) zu definieren.
Als Abstand zweier Punkte auf \(M\) definiert man dann die Länge derjenigen
Kurve zwischen den beiden Punkten, die die kleinste Länge aufweist – man muss
also den kürzesten Weg zwischen den beiden Punkten zurücklegen.
Eine solche kürzeste Kurve bezeichnen wir dann als Geodäte.
Wie der Zusammenhang zwischen einer Geodäte (definiert als kürzeste Kurve)
und einer geodätischen Linie (definiert als geradeste Kurve, siehe
Kapitel 6:
Kovariante Ableitung und Paralleltransport)
aussieht, werden wir uns etwas weiter unten noch genauer ansehen.
Metrik ohne Einbettung und der Einbettungssatz von Nash
Die oben definierte Metrik bezeichnet man auch als
durch die Einbettung auf \(M\) induzierte Metrik.
Wenn wir uns von dem Begriff der Einbettung lösen wollen, so
müssen wir die Metrik etwas anders definieren, da uns dann
das euklidische Skalarprodukt des Einbettungsraums nicht zur
Verfügung steht. In diesem Fall definieren wir die Metrik
daher einfach als bilineare, symmetrische, positiv definite
Abbildung vom Tangentialbündel (Raum der Tangentialräume von \(M\))
in die reellen Zahlen, d.h. \ g(u(p), v(p)) \)
soll einfach dieselben Eigenschaften haben, wie sie die
über eine Einbettung definierte Metrik aufweist. Insbesondere
können wir schreiben:
Dabei muss sich \( g_{\mu\nu}(p) \) bei Koordinatenwechseln
in beiden Indices genau entgegengesetzt zu
\( u^{\mu}(p) \) und \( v^{\nu}(p) \)
transformieren, so dass \( g(u(p), v(p)) \) koordinatenunabhängig ist.
Außerdem muss
\[
g_{\mu\nu}(p) =
g_{\nu\mu}(p)
\]
sein, damit die Metrik symmetrisch ist.
Eine differenzierbare Mannigfaltigkeit mit einer solchen Metrik
bezeichnet man als Riemannsche Mannigfaltigkeit.
Man kann die Bedingung, dass die Metrik positiv definit sein soll
(d.h. \( g(u(p), u(p)) \gt 0 \) wenn \(u(p)\) nicht der Nullvektor ist)
auch abschwächen und statt dessen fordern, dass die Metrik
nicht ausgeartet ist (d.h.
nur der Nullvektor steht auf allen anderen Vektoren senkrecht,
hat also die Metrik Null mit allen anderen Vektoren).
Das bedeutet, dass die Matrix der Komponenten \( g_{\mu\nu} \)
weiterhin invertierbar bleibt, was wir weiter unten noch brauchen.
In diesem Fall spricht man von einer
Pseudo-Riemannsche Mannigfaltigkeit,
oder auch von einer Semi-Riemannsche Mannigfaltigkeit.
In der allgemeinen Relativitätstheorie brauchen wir gerade
eine solche Mannigfaltigkeit.
Auf einer Riemannschen Mannigfaltigkeit ermöglicht es uns
die Metrik über die oben angegebenen Formeln,
die Begriffe Länge,
Winkel und Kurvenlänge sowie Abstand
direkt zu definieren. Wird die Metrik durch eine Einbettung induziert,
so haben die so definierten Begriffe automatisch ihre anschauliche Bedeutung
im euklidischen Einbettungsraum.
Bei einer Semi-Riemannschen Mannigfaltigkeit lassen sich ebenfalls Längen,
Winkel etc. über die obigen Formeln definieren, aber diese Begriffe
haben dann nicht mehr unbedingt die entsprechende anschauliche Bedeutung.
Im Rahmen der allgemeinen Relativitätstheorie gibt es beispielsweise
Vektoren mit positiver, negativer oder verschwindender Länge,
die man als zeitartige, raumartige oder lichtartige Vektoren bezeichnet
(siehe auch Kapitel 3.1
Die Poincare-Gruppe ). Die Kurvenlänge hat dann
etwas mit der sogenannten Eigenzeit zu tun, also der Zeit, die im
bewegten Objekt verstreicht. Details kommen in den späteren Kapiteln.
Zurück zur Metrik ohne Einbettung:
Können wir ohne Einbettung den Term \( g(u(p), v(p)) \) ausrechnen?
Das setzt voraus,
dass wir in irgendeinem Koordinatensystem die Werte von
\( g_{\mu\nu}(p) \) kennen. Diese Werte müssen wir vorgeben
und dadurch die Metrik festlegen, so wie wir beim affinen Zusammenhang in
Kapitel 6:
Kovariante Ableitung und Paralleltransport
ohne Einbettung die Werte der Christoffelsymbole vorgeben mussten.
Dies müssen wir so machen, dass die Metrik symmetrisch und
positiv definit (oder zumindest nicht ausgeartet) bleibt.
Im Prinzip liefert also jede symmetrische nicht ausgeartete bilineare Abbildung
(Tensor) auf den Tangentialvektoren eine Metrik für die Mannigfaltigkeit.
Angenommen, wir haben nun eine Metrik auf \(M\) auf diese Weise vorgegeben.
Kann man umgekehrt eine Einbettung von \(M\) in \(\mathbb{R}^{n}\)
(mit genügend großer Dimension n) finden, so dass die Einbettung
gerade diese Metrik induziert (d.h. so dass
\( g(u(p), v(p)) :=
\langle
u(p), v(p)
\rangle \) ist)?
Das ist tatsächlich der Fall, wie in den Jahren 1954, 1956 und 1966 (jeweils
mit leicht geänderten Voraussetzungen) von John Nash und anderen bewiesen wurde:
Einbettungssatz von Nash (Nash embedding theorem):
Jede Riemannsche Mannigfaltigkeit \(M\) (d.h. jede differenzierbare Mannigfaltigkeit
mit einer darauf definierten positiv-definiten Metrik) kann man isometrisch in einen
euklidischen Raum \(\mathbb{R}^{n}\) einbetten (wenn man n genügend groß wählt).
Dabei bedeutet isometrisch, dass die Länge von Kurven bei der
Einbettung unverändert bleibt. Gleichbedeutend damit ist die Aussage,
dass die Metrik auf \(M\) durch das euklidische Skalarprodukt des \(\mathbb{R}^{n}\)
induziert wird.
Für Semi-Riemannsche Mannigfaltigkeiten gilt der Satz so nicht.
Der Einbettungssatz von Nash ermöglicht es, dass wir uns jede
Riemannsche Mannigfaltigkeit eingebettet im euklidischen Raum
vorstellen können. Trotzdem ist es sehr nützlich, auch auf eine einbettungsfreie
Formulierung zurückgreifen zu können, so wie wir es bisher getan haben.
Damit lassen sich dann auch Semi-Riemannsche Metriken erfassen.
Man braucht sich über die Einbettung keine Gedanken mehr zu machen
und kann sich auf die wesentlichen Aspekte der Mannigfaltigkeit konzentrieren.
Außerdem kann eine Einbettung auch in die Irre führen:
Betrachten wir als Beispiel ein Blatt Papier im dreidimensionalen Raum.
Dieses Papier können wir flach auf einen Tisch legen oder zu einem
Zylinder zusammenrollen. Die Winkel und Abstände (d.h. die Metrik) auf dem Papier
bleiben in beiden Fällen dieselben, d.h. es gibt hier verschiedene
isometrische Einbettungen. Man sagt auch, die äußeren Eigenschaften
von flachem und gerolltem Papier sind verschieden, aber die inneren Eigenschaften
sind dieselben.
In der Differentialgeometrie interessiert man sich im Normalfall
für die inneren Eigenschaften! So ist beispielsweise die Krümmung
(definiert in Kapitel 8:
Krümmung ) des Papiers in beiden Fällen dieselbe (nämlich Null),
da sich ein im Kreis auf dem Papier paralleltransportierter Vektor nicht ändert.
In diesem Sinn haben wir die Krümmung als innere Eigenschaft definiert.
Einbettungssatz von Hassler Whitney (1944):
Man kann jede (einfach-) differenzierbare Mannigfaltigkeit \(M\) der Dimension \(n\)
differenzierbar im \(2n\)-dimensionalen euklidischen Raum \(\mathbb{R}^{2n}\)
einbetten (ohne Selbstüberschneidungen).
Differenzierbar einbetten heißt dabei,
dass es eine differenzierbare injektive Abbildung von \(M\) nach \(\mathbb{R}^{2n}\)
gibt. Die Injektivität ist dabei gleichbedeutend mit dem Verbot von
Selbstüberschneidungen.
Man sieht, dass der Einbettungssatz von Nash weiter geht als der
Einbettungssatz von Whitney: Statt nur
einer differenzierbaren injektiven Einbettung wird sogar
die Existenz einer isometrischen (längenerhaltende) Einbettung
bewiesen.
Wenn man jede differenzierbare Mannigfaltigkeit im euklidischen Raum
überschneidungsfrei und differenzierbar einbetten kann, so
kann man über diese Einbettung auch eine Metrik auf dieser Mannigfaltigkeit
induzieren. Man kann also jede differenzierbare Mannigfaltigkeit mit einer
Riemannschen Metrik versehen!
Das macht allerdings nicht immer wirklich Sinn!
In Kapitel 5:
Co-Tangentialräume und Differentialformen
hatten wir beispielsweise eine Mannigfaltigkeit kennengelernt,
auf der sich eine Metrik nicht in natürlicher Weise definieren lässt:
die projektive Ebene. In solchen Fällen macht auch die
über eine Einbettung induzierte Metrik wenig Sinn, da sie für Nichts
zu gebrauchen ist.
Für die Metrik gibt es noch einige andere Schreibweisen, auf die
wir hier kurz eingehen wollen.
So kann man das Tensorprodukt von Co-Tangentialvektoren
\( dx^{\mu}|_{p} \) (zu Co-Tangentialvektoren siehe
Kapitel 5:
Co-Tangentialräume und Differentialformen)
verwenden, um die Metrik zu definieren:
Definition der Metrik über das Tensorprodukt:
Der metrische Tensor \(g(p)\) wird definiert als bilineare,
positiv definite (oder zumindest nicht ausgeartete) Abbildung über die Gleichung
\[
g(p) :=
\sum_{\mu\nu} \,
g_{\mu\nu}(p) \,
dx^{\mu}|_{p} \otimes dx^{\nu}|_{p}
\]
Dabei ist das Tensorprodukt
\[
dx^{\mu}|_{p} \otimes dx^{\nu}|_{p}
\]
definiert durch die Gleichung
\[
\big[dx^{\mu}|_{p} \otimes dx^{\nu}|_{p}\big] (u(p), v(p))
:=
\]
\[ =
\, \big[dx^{\mu}|_{p} \, u(p)\big] \cdot \big[dx^{\nu}|_{p} \, v(p)\big]
=
\]
\[ =
u^{\mu}(p) \, v^{\nu}(p)
\]
Wir schreiben wie oben dann
abgekürzt
\[
[g(p) (u(p), v(p))] =: g(u(p), v(p))
\]
Es folgen die von oben bereits bekannten Beziehungen
\[
g(u(p), v(p)) =
\sum_{\mu\nu} \,
u^{\mu}(p) \, v^{\nu}(p) \,
g_{\mu\nu}(p)
\]
mit
\[
g_{\mu\nu}(p) =
\]
\[ =
g \left( \frac{\partial}{\partial x^{\mu}}\bigg|_{p} , \frac{\partial}{\partial x^{\nu}}\bigg|_{p} \right)
\]
Übrigens kennen wir das Tensorprodukt bereits von der Cartan'schen Schreibweise
der Krümmung aus Kapitel 8:
Krümmung. Dort hatten wir das äußere Produkt (Dachprodukt)
von Co-Tangentialvektoren definiert durch
\[
[ dx^{\mu} \wedge dx^{\nu} ] (u, v)
:= u^{\mu} v^{\nu} - u^{\nu} v^{\mu}
\]
Wir sehen nun, dass dieses Dachprodukt einfach ein antisymmetrisiertes Tensorprodukt ist:
\[
dx^{\mu} \wedge dx^{\nu} =
\]
\[ =
dx^{\mu} \otimes dx^{\nu} -
dx^{\nu} \otimes dx^{\mu}
\]
(wobei das Minuszeichen analog zum Tensorprodukt oben über die Werte definiert ist:
einfach Mal durch Minus ersetzen). Das Argument \(p\) haben wir hier weggelassen.
In der physikalischen Literatur findet man häufig die Schreibweise
Diese Schreibweise kann man auf zwei gleichwertige Arten interpretieren:
erste Interpretation:
Als Abkürzung für
\[
ds^{2}(p) :=
g(p) =
\]
\[ =
\sum_{\mu\nu} \,
g_{\mu\nu}(p) \,
dx^{\mu} |_{p} \otimes dx^{\nu}|_{p}
\]
im Sinne des Tensorproduktes wie oben angegeben.
Dann ist \( ds^{2}(p) \) eine bilineare symmetrische positiv definite
(oder zumindest nicht ausgeartete)
Abbildung aus dem Tangentialraum in die reellen Zahlen.
zweite Interpretation:
Der Term \(ds\) wird als Linienelement auf der Mannigfaltigkeit
gesehen, d.h. der Ausdruck für \(ds\) wird auf die folgende Weise
im Längenintegral entlang einer Kurve \(\gamma\) verwendet:
\[
L(\gamma,a,b) =
\]
\[
=
\int_{\gamma,a,b} \, ds
=
\]
\[
=
\int_{\gamma,a,b} \,
\sqrt{ \sum_{\mu\nu} \,
g_{\mu\nu} \,
dx^{\mu} \, dx^{\nu} }
:=
\]
\[
=
\int_{a}^{b} \,
\sqrt{ \sum_{\mu\nu} \,
g_{\mu\nu}(\gamma(t)) \,
\left[\frac{d}{dt} \gamma(t)\right]^{\mu} \, \left[\frac{d}{dt} \gamma(t)\right]^{\nu} } \, dt
=
\]
\[
=
\int_{a}^{b} \,
\sqrt{ g \left( \frac{d}{dt} \gamma(t), \frac{d}{dt} \gamma(t) \right) } \, dt
\]
so dass die von oben bereits bekannte Definition für die Länge einer Kurve
auf intuitive Weise reproduziert wird. Dabei ist \( dx^{\mu} \)
als \(\mu\)-te Koordinate des Abstandsvektors zwischen zwei infinitesimal benachbarten
Punkten auf der Kurve \(\gamma\) zu sehen, d.h.
\[
dx^{\mu} =
\left[\frac{d}{dt} \gamma(t)\right]^{\mu} \, dt
\]
Genau genommen müsste man übrigens
\[
\frac{d}{dt}
(f \circ \gamma)^{\mu}(t)) = u^\mu(\gamma(t))
\]
mit der Koordinatenfunktion \(f\) schreiben, sodass
\[
\frac{d}{dt} \gamma(t)
\]
für den Tangentialvektor \(u(p)\) steht, der einer Richtungsableitung in
Kurvenrichtung entspricht:
\[
u(p) \, \phi = \frac{d}{dt} \phi(\gamma(t)) \bigg|_{\gamma(t) = p}
\]
Details
siehe Kapitel 4:
Tangentialräume und Vektorfelder.
Physiker lieben aber die abgekürzte praktischen Schreibweisen, die konkrete Berechnungen
oft sehr intuitiv aussehen lassen – man muss sich allerdings manchmal klar machen, was
man eigentlich hinschreibt.
Metrik und affiner Zusammenhang
Wir haben mit der Metrik in diesem Kapitel eine neue Struktur kennengelernt, die
sich neben dem affinen Zusammenhang
zusätzlich auf einer Mannigfaltigkeit definieren lässt, und die Begriffe
wie Länge, Abstand und Winkel ermöglicht.
Es stellt sich die Frage, ob man eine sinnvolle Verbindung zwischen der Metrik
und dem affinen Zusammenhang herstellen kann.
Am einfachsten ist es, sich dazu wieder an unserer Anschauung zu orientieren
und eine in \( \mathbb{R}^{n} \) eingebettete Mannigfaltigkeit zu betrachten,
z.B. eine gekrümmte Fläche im dreidimensionalen Raum. Die Einbettung induziert dann
zugleich einen affinen Zusammenhang und eine Metrik auf der Mannigfaltigkeit,
wobei die Torsion des Zusammenhangs Null ist (d.h. die Christoffelsymbole
sind symmetrisch). Da die Einbettung also zugleich beide Strukturen
induziert, könnte dies zu einer Verbindung zwischen beiden Strukturen führen.
Wie können wir diese Verbindung aufspüren?
Betrachten wir dazu eine Kurve \( \gamma(t) \) auf der Mannigfaltigkeit
und zwei Vektorfelder
\( u(\gamma(t)) \) und \( v(\gamma(t)) \) entlang dieser Kurve, so dass
wir \( g(u(\gamma(t)), v(\gamma(t))) \) bilden können.
Um neben der Metrik auch den affinen Zusammenhang ins Spiel zu bringen,
wollen wir uns die Veränderung der Metrik entlang der Kurve ansehen.
Dabei wird die Veränderung der Tangentialvektoren entlang der Kurve
ins Spiel kommen, und diese wird ja durch die kovariante Ableitung und damit
durch den affinen Zusammenhang bestimmt.
Die Veränderung der Metrik der beiden Vektorfeldern im Punkt
\( p = \gamma(0) \) ist gegeben durch
\(
\frac{d}{dt} g(u(\gamma(t)), v(\gamma(t))) \bigg|_{t = 0}\).
Aufgrund der Einbettung können wir die folgende Rechnung durchführen:
\[
\frac{d}{dt} g(u(\gamma(t)), v(\gamma(t))) \bigg|_{t = 0} =
\]
... wir verwenden das euklidische Skalarprodukt im Einbettungsraum
\[
=
\frac{d}{dt}
\left\langle u(\gamma(t)), v(\gamma(t)) \right\rangle \bigg|_{t = 0} =
\]
... Produktregel anwenden (diese gilt aufgrund der oben angegebenen Definition
des euklidischen Skalarproduktes):
\[
=
\left\langle
\frac{d}{dt} u(\gamma(t)) \bigg|_{t = 0} , v(p)
\right\rangle
+
\]
\[ +
\left\langle
u(p) , \frac{d}{dt} v(\gamma(t))) \bigg|_{t = 0}
\right\rangle
=
\]
... da \(u(p)\) (und analog \(v(p)\) ) im Tangentialraum \(T(p)\) liegen,
und da das Skalarprodukt mit \(u(p)\) nur von der Projektion des jeweils anderen
Vektors auf \(u(p)\) (analog für \(v(p)\) ) abhängt,
können wir im Skalarprodukt den Projektionsvektor
\(P|_{T(p)}\) auf den Tangentialraum einfügen, ohne
den Wert des Skalarproduktes dadurch zu verändern:
\[ =
\left\langle
P|_{T(p)} \frac{d}{dt} u(\gamma(t)) \bigg|_{t = 0} , v(p)
\right\rangle
+
\]
\[ +
\left\langle
u(p) , P|_{T(p)} \frac{d}{dt} v(\gamma(t))) \bigg|_{t = 0}
\right\rangle
= \, ...
\]
... die durch die Einbettung induzierte kovariante Ableitung ist
nun gerade definiert als
\[
D_{w(p)} u :=
P|_{T(p)} \frac{d}{dt} u(\gamma(t)) \bigg|_{t = 0}
\]
(siehe Kapitel 6:
Kovariante Ableitung und Paralleltransport). Dabei ist \(w(p)\) der zur Kurve \(\gamma(t)\)
in \(t = 0\) gehörende Tangentialvektor, d.h. aufgrund der Einbettung
ist
\[
w(p) = \frac{d}{dt} \gamma(t) \bigg|_{t = 0}
\]
Wir können also weiter schreiben:
\[
... \, =
\langle
D_{w(p)}u , v(p)
\rangle
+
\langle
u(p) , D_{w(p)}v
\rangle
=
\]
... da die Vektoren im Skalarprodukt alle Tangentialvektoren sind,
können wir das Skalarprodukt wieder durch die Metrik ersetzen und erhalten
\[
=
g\left( D_{w(p)}u , v(p) \right)
+
g\left( u(p) , D_{w(p)}v \right)
\]
Unseren Startterm können wir andererseits auch schreiben als
\[
\frac{d}{dt} g(u(\gamma(t)), v(\gamma(t))) \bigg|_{t = 0} =
w(p) \, g(u,v)
\]
denn \( g(u,v) \) ist eine skalare Funktion auf der
Mannigfaltigkeit, und \(w(p)\) liefert die Richtungsableitung
in Kurvenrichtung. Insgesamt haben wir also das folgende Ergebnis:
Zusammenhang zwischen Metrik und kovarianter Ableitung, wenn beide
durch eine Einbettung induziert werden (Verträglichkeitsbedingung):
Man kann diese Verträglichkeitsbedingung so interpretieren:
Die Änderung der Metrik (in Richtung \(w(p)\)) von zwei Tangentialvektoren
kommt allein aufgrund der Änderungen der beiden Tangentialvektoren
in dieser Richtung zustande, d.h. die Metrik als bilineare Abbildung selber
(gegeben durch die Komponenten \(g_{\mu\nu}(p)\) ) ändert sich in
diesem Sinne nicht (was nicht bedeutet, das die Komponenten
\(g_{\mu\nu}(p)\) konstant sind).
Die Änderung der Tangentialvektoren ist dabei
durch den affinen Zusammenhang definiert (dies entspricht bei einer
Einbettung der Projektion der Änderung auf den Tangentialraum).
In Kapitel 6:
Kovariante Ableitung und Paralleltransport
hatten wir dafür die Schreibweise
\[
D_{w(p)} g = 0
\]
kennengelernt,
die gleichbedeutend mit der Verträglichkeitsbedingung ist.
Halten wir fest:
Werden Metrik und affiner Zusammenhang beide durch eine Einbettung induziert,
so gilt die Verträglichkeitsbedingung
\[
w(p) \, g(u,v) =
\]
\[ =
g\left( D_{w(p)}u , v(p) \right)
+
g\left( u(p) , D_{w(p)}v \right)
\]
d.h. Metrik und affiner Zusammenhang
sind nicht unabhängig voneinander.
Außerdem ist die Torsion gleich Null (dies ist immer der Fall,
wenn der affine Zusammenhang durch eine Einbettung induziert wird).
Gehen wir nun einen Schritt weiter und lassen die Einbettung weg.
Dann sind wir natürlich nicht mehr gezwungen, die obige Verträglichkeitsbedingung
zwischen Metrik und affinem Zusammenhang anzunehmen.
Wir könnten beides als voneinander unabhängige Strukturen auf der
Mannigfaltigkeit nebeneinander bestehen lassen.
Eine geodätische Linie (definiert als geradeste Linie im Sinne des
affinen Zusammenhangs) hätte dann nichts mit einer Geodäte
(der kürzesten Linie im Sinne der Metrik) zu tun.
Dennoch ist zu erwarten, dass es in vielen Fällen nützlich sein kann,
wenn man einen affinen Zusammenhang auf der Mannigfaltigkeit verwendet,
der die Verträglichkeitsbedingung mit einer vorgegebenen Metrik
erfüllt. Oft ist es zusätzlich nützlich, diesen Zusammenhang torsionsfrei
zu wählen, so wie das bei einer Einbettung der Fall ist.
Bleibt die Frage: Geht das immer, und wie eindeutig ist
der affine Zusammenhang durch die Verträglichkeitsbedingung mit der Metrik
und durch die Forderung nach Torsionsfreiheit festgelegt?
Hier ist die Antwort:
Hauptsatz der Riemannschen Geometrie:
Zu jeder Riemannschen oder Semi-Riemannschen Mannigfaltigkeit
mit gegebener (positiv definiter oder zumindest nicht ausgearteter) Metrik \(g\)
existiert genau ein affiner torsionsfreier Zusammenhang
(gleichbedeutend mit der kovarianten Ableitung),
der die obige Verträglichkeitsbedingung erfüllt.
Man bezeichnet diesen Zusammenhang auch als
Levi-Civita-Zusammenhang bzw. als (Semi-) Riemannschen Zusammenhang.
Den Beweis werden wir uns etwas weiter unten ansehen, wenn wir die
Verträglichkeitsbedingung in Koordinaten ausschreiben.
Koordinatenfreie Beweise finden sich in vielen Textbüchern der Differentialgeometrie.
Zur Verdeutlichung sei hier noch einmal gesagt, dass man neben der
Verträglichkeitsbedingung die Torsionsfreiheit explizit fordern muss,
um die Eindeutigkeit des Zusammenhangs zu erzielen.
Es gibt auch affine Zusammenhänge, die die Verträglichkeitsbedingung erfüllen,
die aber nicht torsionsfrei sind. Man spricht dann von metrischen Zusammenhängen
mit Torsion.
Es gibt eine interessante Formulierung, die
gleichwertig zur Verträglichkeitsbedingung
\[
w(p) \, g(u,v) =
\]
\[ =
g\left( D_{w(p)}u , v(p) \right)
+
g\left( u(p) , D_{w(p)}v \right)
\]
von oben ist, und die die anschauliche Bedeutung dieser Bedingung
noch einmal klar macht. Hier ist sie:
Beim Paralleltransport zweier Tangentialvektoren \(u\) und \(v\)
ändert sich die Metrik zwischen diesen Vektoren nicht
(d.h. ihre Länge und der Winkel zwischen ihnen bleibt konstant).
Der Paralleltransport ist also eine Isometrie bezüglich \(g\).
Anders gesagt: Sind \(u\) und \(v\) zwei Vektorfelder,
die jeweils parallel entlang einer Kurve \(\gamma\) sind,
so hat \( g( u(\gamma(t)), v(\gamma(t)) ) \)
überall auf der Kurve denselben Wert, d.h.
\[
\frac{d}{dt} g( u(\gamma(t)), v(\gamma(t)) ) = 0
\]
Das folgt unmittelbar aus der Verträglichkeitsbedingung, denn
aus der Parallelitätseigenschaft von \(u\) (und analog von \(v\)) folgt
\( D_{w(p)}u = 0 \) und \( D_{w(p)}v = 0 \)
(\(p\) ist dabei ein Punkt auf der Kurve und \(w(p)\) Tangentialvektor der Kurve,
Details diehe Kapitel 6:
Kovariante Ableitung und Paralleltransport).
Besonders anschaulich ist der Fall, bei dem die Kurve \(\gamma(t)\) eine
geodätische Linie ist (z.B. ein Großkreis auf einer Kugeloberfläche).
Wählt man die Kurvenparametrisierung geeignet, so kann man
für den Tangentialvektor \(w(p)\) der Kurve in jedem Punkt \(p\) auf der Kurve
die Bedingung
\[
D_{w(p)}w = 0
\]
erreichen, d.h.
die Tangentialvektoren der Kurve bilden ein Parallel-Vektorfeld entlang der Kurve.
Paralleltransportiert man nun einen Vektor \(u(p)\) entlang der geodätischen
Linie und konstruiert so ein Parallel-Vektorfeld \(u\),
so gilt nach dem oben Gesagten überall auf der Kurve, dass
\[
g( u(\gamma(t)), w(\gamma(t)) )
\]
konstant ist.
Der Winkel zwischen dem Vektor \(u\) und der Gerade-aus-Richtung der
geodätischen Linie (gegeben durch \(w\)) ändert sich also beim Paralleltransport nicht!
Genau so würde man sich beispielsweise den Paralleltransport eines
Vektors entlang eines Großkreises auf einer Kugeloberfläche vorstellen:
Paralleltransport eines Tangentialvektors entlang entlang dreier Großkreise (geodätischer Linien)
auf der Kugeloberfläche.
Der Winkel zwischen dem Vektor und dem Großkreis ändert sich beim Paralleltransport
nicht.
Verträglichkeitsbedingung in Koordinatendarstellung; Torsion
Wir wollen nun die Verträglichkeitsbedingung von oben in Koordinaten ausschreiben, um
den Zusammenhang zwischen den Christoffelsymbolen und den Komponenten der Metrik
explizit zu sehen. Die Verträglichkeitsbedingung lautet (siehe oben):
\[
w(p) \, g(u,v) =
\]
\[ =
g\left( D_{w(p)}u , v(p) \right)
+
g\left( u(p) , D_{w(p)}v \right)
\]
Betrachten wir zunächst die linke Seite (wir lassen Argumente wie \(p\) meist weg,
um die Schreibweise kompakt zu halten):
\[
w(p) \, g(u,v) =
\]
\[ =
\sum_{\mu} \, w^{\mu} \frac{\partial}{\partial x^{\mu}}
\left( \sum_{\nu \rho} \, g_{\nu\rho} \, u^{\nu} \, v^{ \rho} \right)
=
\]
\[
=
\sum_{\mu\nu \rho} \,
\bigg( \left[ \frac{\partial g_{\nu\rho}}{\partial x^{\mu}} \right] \, w^{\mu} u^{\nu} \, v^{ \rho}
+
\]
\[ +
g_{\nu\rho} \, w^{\mu} \left[ \frac{\partial u^{\nu}}{\partial x^{\mu}} \right] \, v^{ \rho}
+ \]
\[ +
g_{\nu\rho} \, w^{\mu} u^{\nu} \, \left[ \frac{\partial v^{ \rho}}{\partial x^{\mu}} \right]
\bigg)
\]
Und nun zur rechnen Seite.
Um diesen Term mit dem Ausdruck hinter dem Gleichheitszeichen vergleichen zu können,
nennen wir im zweiten Schritt die Indizes hinter dem Gleichheitszeichen entsprechend um
(so dass \(w\) den Index \(\mu\), \(u\) den Index \(\nu\) und \(v\) den Index \(\rho\) erhält)
und sortieren ein wenig:
\[ =
g\left( D_{w(p)}u , v(p) \right)
+
g\left( u(p) , D_{w(p)}v \right)
=
\]
\[
=
\sum_{\mu\nu} \, g_{\mu\nu}
\bigg(
\sum_{\rho} w^{\rho}
\left[ \frac{\partial u^{\mu}}{\partial x^{\rho}} \right]
+
\sum_{\rho\sigma} \,
u^{ \rho} \, \Gamma^{\mu}_{\sigma\rho} \, w^{\sigma} \bigg)
v^{\nu} +
\]
\[
+
\sum_{\mu\nu} \, g_{\mu\nu} \,
u^{\mu}
\bigg(
\sum_{\rho} w^{\rho}
\left[ \frac{\partial v^{\nu}}{\partial x^{\rho}} \right]
+
\sum_{\rho\sigma} \,
v^{ \rho} \, \Gamma^{\nu}_{\sigma\rho} \, w^{\sigma} \bigg)
=
\]
\[
=
\sum_{\mu\nu \rho} \, \bigg(
g_{\mu\nu} \,
w^{\rho} \,
\left[ \frac{\partial u^{\mu}}{\partial x^{\rho}} \right]
\, v^{\nu}
+
g_{\mu\nu} \,
w^{\rho} \, u^{\mu} \,
\left[ \frac{\partial v^{\nu}}{\partial x^{\rho}} \right]
\bigg)
+
\]
\[
+
\sum_{\mu\nu \rho\sigma} \, \bigg(
g_{\mu\nu} \, \Gamma^{\mu}_{\sigma\rho}
\, w^{\sigma} \, u^{ \rho} \, v^{\nu}
+
g_{\mu\nu} \, \Gamma^{\nu}_{\sigma\rho} \,
w^{\sigma} \, u^{\mu} \, v^{ \rho} \bigg)
=
\]
\[
=
\sum_{\mu\nu \rho} \, \bigg(
g_{\nu\rho} \,
w^{\mu} \,
\left[ \frac{\partial u^{\nu}}{\partial x^{\mu}} \right]
\, v^{\rho}
+
g_{\nu\rho} \,
w^{\mu} \, u^{\nu} \,
\left[ \frac{\partial v^{\rho}}{\partial x^{\mu}} \right]
\bigg)
+
\]
\[
+
\sum_{\mu\nu \rho\sigma} \, \bigg(
g_{\sigma\rho} \, \Gamma^{\sigma}_{\mu\nu}
\, w^{\mu} \, u^{\nu} \, v^{\rho}
+
g_{\nu\sigma} \, \Gamma^{\sigma}_{\mu\rho}
\, w^{\mu} \, u^{\nu} \, v^{\rho} \bigg)
\]
Insgesamt haben wir also
\[
\sum_{\mu\nu \rho} \,
\bigg( \left[ \frac{\partial g_{\nu\rho}}{\partial x^{\mu}} \right] \, w^{\mu} u^{\nu} \, v^{ \rho}
+
\]
\[ +
g_{\nu\rho} \, w^{\mu} \left[ \frac{\partial u^{\nu}}{\partial x^{\mu}} \right] \, v^{ \rho}
+ \]
\[ +
g_{\nu\rho} \, w^{\mu} u^{\nu} \, \left[ \frac{\partial v^{\rho}}{\partial x^{\mu}} \right]
\bigg) =
\]
\[
=
\sum_{\mu\nu \rho} \, \bigg(
g_{\nu\rho} \,
w^{\mu} \,
\left[ \frac{\partial u^{\nu}}{\partial x^{\mu}} \right]
\, v^{\rho}
+
g_{\nu\rho} \,
w^{\mu} \, u^{\nu} \,
\left[ \frac{\partial v^{\rho}}{\partial x^{\mu}} \right]
\bigg)
+
\]
\[
+
\sum_{\mu\nu \rho\sigma} \, \bigg(
g_{\sigma\rho} \, \Gamma^{\sigma}_{\mu\nu}
\, w^{\mu} \, u^{\nu} \, v^{\rho}
+
g_{\nu\sigma} \, \Gamma^{\sigma}_{\mu\rho}
\, w^{\mu} \, u^{\nu} \, v^{\rho} \bigg)
\]
Wie wir sehen, fallen einige Terme weg, da sie auf beiden Seiten des Gleichheitszeichens vorkommen.
Es bleibt übrig:
\[
\sum_{\mu\nu \rho} \,
\left[ \frac{\partial g_{\nu\rho}}{\partial x^{\mu}} \right]
\, w^{\mu} u^{\nu} v^{ \rho}
=
\]
\[ =
\sum_{\mu\nu \rho\sigma} \, \bigg(
g_{\sigma\rho} \Gamma^{\sigma}_{\mu\nu}
w^{\mu} u^{\nu} v^{\rho}
+
g_{\nu\sigma} \Gamma^{\sigma}_{\mu\rho}
w^{\mu} u^{\nu} v^{\rho} \bigg)
\]
Da diese Gleichung für alle Vektoren \(u, v\) und \(w\) erfüllt sein muss, erhalten wir
schließlich als Ergebnis
Diese Gleichung liefert einen Zusammenhang zwischen der Metrik
und den Christoffelsymbolen (und damit dem affinen Zusammenhang).
Man kann diese Gleichung (unter bestimmten Voraussetzungen) mit einem Trick invertieren und so nach
den Christoffelsymbolen freistellen
(siehe z.B.
Wikipedia: Fundamental theorem of Riemannian geometry).
Dazu schreiben wir die Gleichung dreimal mit geschickter Indexbenennung auf:
einmal wie zuvor, einmal mit Indices \(\rho\) und \(\mu\) vertauscht
und einmal mit anschließend noch vertauschten Indices \(\nu\) und \(\rho\):
\[
\left[ \frac{\partial g_{\nu\rho}}{\partial x^{\mu}} \right]
=
\sum_{\sigma} \, \bigg(
g_{\sigma\rho} \, \Gamma^{\sigma}_{\mu\nu}
+
g_{\nu\sigma} \, \Gamma^{\sigma}_{\mu\rho}
\bigg)
\]
\[
\left[ \frac{\partial g_{\nu\mu}}{\partial x^{\rho}} \right]
=
\sum_{\sigma} \, \bigg(
g_{\sigma\mu} \, \Gamma^{\sigma}_{\rho\nu}
+
g_{\nu\sigma} \, \Gamma^{\sigma}_{\rho\mu}
\bigg)
\]
\[
\left[ \frac{\partial g_{\rho\mu}}{\partial x^{\nu}} \right]
=
\sum_{\sigma} \, \bigg(
g_{\sigma\mu} \, \Gamma^{\sigma}_{\nu\rho}
+
g_{\rho\sigma} \, \Gamma^{\sigma}_{\nu\mu}
\bigg)
\]
Nun addieren wir die ersten beiden Gleichungen und subtrahieren die dritte Gleichung:
\[
\left[ \frac{\partial g_{\nu\rho}}{\partial x^{\mu}} \right]
+
\left[ \frac{\partial g_{\nu\mu}}{\partial x^{\rho}} \right]
-
\left[ \frac{\partial g_{\rho\mu}}{\partial x^{\nu}} \right]
=
\]
\[
=
\, \sum_{\sigma} \,
\bigg(
g_{\sigma\rho} \Gamma^{\sigma}_{\mu\nu}
+
g_{\nu\sigma} \Gamma^{\sigma}_{\mu\rho}
+
g_{\sigma\mu} \Gamma^{\sigma}_{\rho\nu}
+
g_{\nu\sigma} \Gamma^{\sigma}_{\rho\mu}
+
\]
\[
-
g_{\sigma\mu} \Gamma^{\sigma}_{\nu\rho}
-
g_{\rho\sigma} \Gamma^{\sigma}_{\nu\mu}
\bigg)
\]
Mit Hilfe der Torsion
\[
T^{ \rho}_{\nu\mu} :=
\Gamma^{ \rho}_{\nu\mu} - \Gamma^{ \rho}_{\mu\nu}
\]
(siehe Kapitel 7:
Torsion ) und unter Verwendung der Symmetrie der Metrik
können wir dies schreiben als
\[
\left[ \frac{\partial g_{\nu\rho}}{\partial x^{\mu}} \right]
+
\left[ \frac{\partial g_{\nu\mu}}{\partial x^{\rho}} \right]
-
\left[ \frac{\partial g_{\rho\mu}}{\partial x^{\nu}} \right]
=
\]
\[
=
\sum_{\sigma} \,
\bigg(
g_{\sigma\rho} \, T^{\sigma}_{\mu\nu}
+
g_{\sigma\mu} \, T^{\sigma}_{\rho\nu}
+
g_{\nu\sigma}
\left( \Gamma^{\sigma}_{\rho\mu}
+
\Gamma^{\sigma}_{\mu\rho} \right)
\bigg)
\]
An dieser Stelle brauchen wir nun unsere zweite Voraussetzung:
Wir betrachten nur noch torsionsfreie affine Zusammenhänge, d.h.
wir fordern \( T^{\sigma}_{\mu\nu} = 0 \).
Die Christoffelsymbole sollen also symmetrisch in den beiden unteren Indizes sein,
so wie das bei affinen Zusammenhängen der Fall ist, die durch eine Einbettung
induziert werden.
Die Gleichung vereinfacht sich damit zu
\[
\left[ \frac{\partial g_{\nu\rho}}{\partial x^{\mu}} \right]
+
\left[ \frac{\partial g_{\nu\mu}}{\partial x^{\rho}} \right]
-
\left[ \frac{\partial g_{\rho\mu}}{\partial x^{\nu}} \right]
=
\]
\[
=
\sum_{\sigma} \,
2 g_{\nu\sigma} \,
\Gamma^{\sigma}_{\rho\mu}
\]
Wir hatten oben vorausgesetzt, dass die Metrik nicht ausgeartet ist, so dass
wir die Matrix mit den Komponenten \( g_{\mu\nu} \) invertieren können.
Die Komponenten der inversen Matrix schreiben wir als
\( g^{\mu\nu} \), d.h. wir verlangen
\[
\sum_{\rho}
\, g^{\mu\rho} \, g_{\rho\nu} =
\delta^{\mu}_{\,\nu}
\]
(den Grund für diese Schreibweise werden wir weiter unten noch kennenlernen;
er hat etwas mit der Identifikation von Tangential- und Cotangentialvektoren
zu tun, d.h. mit dem sogenannten Hochziehen von Indizes).
Damit können wir die metrischen Matrixelemente oben auf die linke Seite bringen und
so die Gleichung nach den Christoffelsymbolen freistellen:
Zusammenhang zwischen Christoffelsymbolen und Metrik im torsionsfreien Fall:
Die Gleichung ist symmetrisch in \(\mu\) und \(\rho\), wie es wegen der geforderten
Torsionsfreiheit sein muss. Und: Die Gleichung ermöglicht es uns,
bei gegebener Metrik die Christoffelsymbole eindeutig auszurechnen!
Damit liefert diese Gleichung einen Beweis für den Hauptsatz der Riemannschen Geometrie!
Übrigens ist diese Gleichung nicht unbedingt der beste Weg, um bei gegebener Metrik
die Christoffelsymbole auch praktisch zu berechnen. Hier gibt es noch andere,
praktikablere Methoden, auf die wir an dieser Stelle aber nicht eingehen wollen.
Wie sieht es nun in dem Fall mit Torsion aus?
Die entsprechenden Christoffelsymbole können wir in einen symmetrischen und einen
antisymmetrischen Anteil aufteilen, wobei der symmetrische Anteil mit der
Metrik verträglich sein soll. Die Idee dabei ist:
Wir starten mit symmetrischen Christoffelsymbolen, die mit der Metrik
verträglich sind (wir starten also mit einem Levi-Civita-Zusammenhang),
und fügen einen antisymmetrischen Anteil
hinzu, wobei Torsion ins Spiel kommt. Dann sehen wir nach,
ob dieser antisymmetrische Anteil die Metrik-Verträglichkeit beeinträchtigt:
\[
\Gamma^{ \rho}_{\mu\nu}
=
\]
\[ =
\frac{1}{2} \, (\Gamma^{ \rho}_{\mu\nu} + \Gamma^{ \rho}_{\nu\mu})
+
\frac{1}{2} \, (\Gamma^{ \rho}_{\mu\nu} - \Gamma^{ \rho}_{\nu\mu})
=:
\]
\[
=:
[\Gamma_{sy}]^{ \rho}_{\mu\nu}
+
\frac{1}{2} \, T^{ \rho}_{\mu\nu}
\]
Diese Christoffelsymbole sollen mit der Metrik verträglich sein, d.h.
wir können die Gleichung von oben verwenden, kurz bevor wir
die Torsion gleich Null gesetzt haben (wobei wir
\( \Gamma^{\sigma}_{\rho\mu}
+ \Gamma^{\sigma}_{\mu\rho} =
2 \, [\Gamma_{sy}]^{\sigma}_{\rho\mu} \) einsetzen):
\[
\left[ \frac{\partial g_{\nu\rho}}{\partial x^{\mu}} \right]
+
\left[ \frac{\partial g_{\nu\mu}}{\partial x^{\rho}} \right]
-
\left[ \frac{\partial g_{\rho\mu}}{\partial x^{\nu}} \right]
=
\]
\[
=
\sum_{\sigma} \,
\bigg(
g_{\sigma\rho} \, T^{\sigma}_{\mu\nu}
+
g_{\sigma\mu} \, T^{\sigma}_{\rho\nu}
+
g_{\nu\sigma}
\left( \Gamma^{\sigma}_{\rho\mu}
+
\Gamma^{\sigma}_{\mu\rho} \right)
\bigg)
=
\]
\[
=
\sum_{\sigma} \,
\bigg(
g_{\sigma\rho} \, T^{\sigma}_{\mu\nu}
+
g_{\sigma\mu} \, T^{\sigma}_{\rho\nu}
+
2 \, g_{\nu\sigma} \,
[\Gamma_{sy}]^{\sigma}_{\rho\mu}
\bigg)
\]
Der symmetrische Anteil erfüllt nach Voraussetzung diese Verträglichkeitsbedingung
mit Torsion Null sowieso, d.h. es gilt:
\[
\left[ \frac{\partial g_{\nu\rho}}{\partial x^{\mu}} \right]
+
\left[ \frac{\partial g_{\nu\mu}}{\partial x^{\rho}} \right]
-
\left[ \frac{\partial g_{\rho\mu}}{\partial x^{\nu}} \right]
=
\]
\[
=
\sum_{\sigma} \,
2 g_{\nu\sigma} \,
[\Gamma_{sy}]^{\sigma}_{\rho\mu}
\]
Ziehen wir diese Gleichung von der vorhergehenden ab, so sehen wir,
dass der antisymmetrische Anteil (die Torsion) die folgende
Verträglichkeitsbedingung erfüllen muss:
\[
0 =
\sum_{\sigma} \,
\left(
g_{\sigma\rho} \, T^{\sigma}_{\mu\nu}
+
g_{\sigma\mu} \, T^{\sigma}_{\rho\nu}
\right)
\]
Diese Bedingung muss erfüllt sein, damit der Zusammenhang (der jetzt Torsion besitzen darf)
mit der Metrik verträglich ist (d.h. der symmetrische Anteil der Christoffelsymbole
erfüllt die Verträglichkeitsbedingung)!
Eine Lösung dieser Bedingung ist natürlich \( T^{\sigma}_{\mu\nu} = 0 \),
also der torsionsfreie Fall. Es kann aber durchaus weitere Lösungen geben,
so dass es im Allgemeinen mehrere Metrik-verträgliche affine Zusammenhänge
geben wird, wenn wir Torsion zulassen. Erst wenn wir Torsionsfreiheit fordern,
legt die Verträglichkeitsbedingung den affinen Zusammenhang eindeutig fest!
Betrachten wir wieder das Beispiel, das wir aus den beiden Kapiteln
7:
Torsion und 8:
Krümmung bereits kennen: den reellen dreidimensionalen euklidischen Raum
mit dem konstanten total antisymmetrischen
affinen Zusammenhang
\[
\Gamma^{ \rho}_{\nu\mu}
= \epsilon^{\rho}_{\,\nu\mu}
\]
d.h.
\[
T^{\rho}_{\nu\mu}
= 2 \, \epsilon^{\rho}_{\,\nu\mu}
\]
Dabei ist \( \epsilon^{ \rho}_{\, \nu\mu} \)
gleich Null für zwei gleiche Indices, antisymmetrisch bei Vertauschung zweier Indices
und es ist \( \epsilon^{1}_{\, 2 3} =
\epsilon^{2}_{\, 3 1} = \epsilon^{3}_{\, 1 2} = 1 \).
In Kapitel 7:
Torsion hatten wir gesehen, dass die geodätischen Linien hier einfach
Geraden sind, denn in die Geodätengleichung geht nur der symmetrische Anteil
der Christoffelsymbole ein. Eine Parallelverschiebung entlang einer Geraden
führt dabei zu einer Drehung um die Gerade, so dass sich eine schraubenförmige Bewegung ergibt.
Obwohl die geodätischen Linien Geraden im dreidimensionalen Raum sind,
hatten wir am Ende von Kapitel 8:
Krümmung gesehen, dass die Krümmung für dieses
Beispiel nicht Null ist! Das hängt mit der schraubenförmigen Drehbewegung beim
Paralleltransport zusammen. Sie bewirkt, dass sich ein Vektor, den man auf einer kleinen
Rundreise paralleltransportiert, bei der Rückkehr zum Ausgangspunkt verändert hat.
Dieses Verhalten ist etwas überaschend. Wir können nun den Grund dafür erkennen:
Die anschauliche gewohnte Bedeutung haben Krümmung und affiner Zusammenhang nur,
wenn sie durch eine Einbettung induziert werden können.
Dies ist bei Torsion nicht der Fall. Der torsionsfreie Levi-Civita-Zusammenhang ist dagegen
durch die Metrik eindeutig bestimmt und kann zusammen mit der Metrik durch eine
Einbettung induziert werden – schließlich haben wir die Verträglichkeitsbedingung
oben zunächst anschaulich anhand einer Einbettung formuliert.
In diesem Fall erst haben Krümmung, Paralleltransport usw. die
anschauliche Bedeutung, die wir intuitiv erwarten. Der Grund dafür liegt einfach darin,
dass wir alle Begriffe ja anschaulich aufgrund einer Einbettung definiert haben.
Kommt Torsion ins Spiel, so geht diese anschauliche Begründung der Begriffe verloren,
und wir erleben die eine oder andere Überaschung.
Übrigens: Wir sehen, dass der total antisymmetrische affine Zusammenhang
sogar mit der üblichen euklidischen Metrik verträglich ist.
Dazu setzen wir in der Verträglichkeitsbedingung
\[
0 =
\sum_{\sigma} \,
\left(
g_{\sigma\rho} \, T^{\sigma}_{\mu\nu}
+
g_{\sigma\mu} \, T^{\sigma}_{\rho\nu}
\right)
\]
einfach \( g_{\sigma\rho} = \delta_{\sigma\rho} \)
(euklidische Metrik)
sowie unsere speziellen Christoffelsymbole \( T^{ \rho}_{\nu\mu}
= 2 \, \epsilon^{ \rho}_{\nu\mu} \)
ein:
\[
0 =
\sum_{\sigma} \,
\left(
\delta_{\sigma\rho} \, 2 \epsilon^{\sigma}_{\,\mu\nu}
+
\delta_{\sigma\mu} \, 2 \epsilon^{\sigma}_{\,\rho\nu}
\right)
=
\]
\[
=
2 \, \left(
\epsilon^{\rho}_{\,\mu\nu}
+
\epsilon^{\mu}_{\,\rho\nu}
\right)
\]
Diese Gleichung ist erfüllt, da wegen der Antisymmetrie
\( \epsilon^{ \rho}_{\,\mu\nu}
= - \epsilon^{ \mu}_{\,\rho\nu} \) gilt.
Damit haben wir im dreidimensionalen Raum ein Beispiel für einen affinen Zusammenhang vor uns,
der kein Levi-Civita-Zusammenhang ist (weil er nicht torsionsfrei ist), der aber
dennoch mit der euklidischen Metrik verträglich ist!
Geödätische Linien (geradeste Linien) und Geodäten (kürzeste Linien)
In Kapitel 6:
Kovariante Ableitung und Paralleltransport hatten wir geodätische Linien als
die geradesten Kurven im Sinne des affinen Zusammenhangs definiert.
Damit meinen wir, dass die
kovariante Ableitung des Tangentialvektors \(v(\gamma(t))\) der geodätischen Linie
\(\gamma\) an jedem Punkt \(\gamma(t)\)
proportional zum Tangentialvektor selbst ist.
Die Anschauung dahinter ist: Bei einer Einbettung soll die Beschleunigung
nur in Bewegungsrichtung oder senkrecht zur Fläche wirken, aber nicht
tangential zur Fläche nach rechts oder links.
Es soll also gelten:
\[
D_{v(\gamma(t))} v = c(t) \, v(\gamma(t))
\]
wobei man durch Umparametrisierung der Kurve \( c(t) = 0 \) erreichen kann,
so dass die Tangentialvektoren der Kurve ein Parallelfeld entlang der Kurve
bilden (anschaulich wirkt dann die Beschleunigung nur senkrecht zur Fläche).
Die Metrik bietet nun die Möglichkeit, eine andere Sorte von Linien zu definieren:
die kürzeste Linie zwischen zwei Punkten. Diese Linien nennt man Geodäten.
Wie kann man eine solche Linie nun ausrechnen?
Oben hatten wir die
Länge \(L(\gamma,a,b)\) einer Kurve \(\gamma\) zwischen zwei Punkten
\( p_{a} := \gamma(a) \) und \( p_{b} := \gamma(b) \)
definiert durch
\[
L(\gamma,a,b) := \int_{a}^{b} \,
\sqrt{ g \left( \frac{d}{dt} \gamma(t), \frac{d}{dt} \gamma(t) \right) } \, dt
\]
Um die Geodäte zwischen den Punkten \(p_{a}\) und \(p_{b}\) zu finden,
müssen wir diejenige Kurve \(\gamma\) suchen, die
\( p_{a} := \gamma(a) \) und \( p_{b} := \gamma(b) \)
erfüllt und die das Längenfunktional \( L(\gamma,a,b) \) minimiert.
Wie so etwas mit Hilfe der Variationsrechnung geht, ist in
Quantenfeldtheorie und Eichfelder, Kapitel 3:
Die Quantisierung der klassischen Mechanik
beim Prinzip der kleinsten Wirkung ausführlich beschrieben.
Als Ergebnis erhält man eine Differentialgleichung
für die Kurve \( \gamma \), die man auch als Euler-Lagrange-Gleichung
der Geodäten bezeichnet. Wir wollen die mühsame Rechnung hier nicht durchführen,
sondern gleich das Ergebnis angeben:
Die Euler-Lagrange-Gleichung ist für einen Levi-Civita-Zusammenhang
identisch mit der Differentialgleichung für eine geodätische Linie.
Es gilt also:
Für einen Levi-Civita-Zusammenhang (d.h. der affine Zusammenhang ist
mit der Metrik verträglich und die Torsion ist Null) sind
geodätische Linien und Geodäten identisch. Die
kürzeste Verbindung zwischen zwei Punkten (also die Geodäte) ist
zugleich eine geodätische Linie (also eine der geradesten Verbindungen).
Anmerkung: Im Prinzip sind mehrere geodätische Linien
zwischen zwei Punkten möglich. So kann man auf einer Kugeloberfläche einen
Großkreis immer auf zwei verschiedene Arten zwischen zwei Punkten durchlaufen:
entweder man nimmt den direkten Weg oder man läuft den langen
Weg auf der anderen Seite der Kugel herum. Die kürzeste der geodätischen Linien
ist dabei dann zugleich die Geodäte (also die kürzeste aller Linien
zwischen den Punkten).
Noch eine Randbemerkung zur Krümmung:
Wir hatten die Krümmung in Kapitel 8:
Krümmung allein mit Hilfe des affinen Zusammenhangs
definiert, nämlich über die im-Kreis-Parallelverschiebung eines Tangentialvektors.
Man könnte jedoch die Krümmung auch mit Hilfe der Metrik definieren.
So gilt auf einer Kugeloberfläche nicht mehr, dass die Summe der Winkel eines Dreiecks
(definiert durch die Metrik) gleich 180 Grad ist, oder dass der Umfang eines
Kreises gleich 2 mal Pi mal dem Radius ist. Diese Abweichungen liefern anschaulich
ebenfalls eine Definitionsmöglichkeit für die Krümmung.
Das schöne am Levi-Civita-Zusammenhang ist nun, dass sich die Definition
der Krümmung aufgrund des affinen Zusammenhangs mit der Definition aufgrund
der Metrik in Übereinstimmung bringen lässt. Beide Definitionsmöglichkeiten
erweisen sich dann als gleichwertig!
Identifikation von Tangentialvektoren und Co-Tangentialvektoren;
Hoch- und Runterziehen von Indices
Bei einer n-dimensionalen Mannigfaltigkeit sind sowohl der Tangentialraum \(T(p)\)
als auch der Co-Tangentialraum \(T^{*}(p)\) an einem Punkt \(p\) n-dimensionale reelle
Vektorräume, so dass man natürlich bijektive Abbildungen zwischen diesen
Vektorräumen definieren kann, die jedem Tangentialvektor eindeutig einen
Co-Tangentialvektor zuordnen. In Kapitel 5:
Co-Tangentialräume und Differentialformen hatten wir allerdings auch gesehen, dass
sich zunächst keine solche Abbildung in natürlicher Weise anbietet.
Das ändert sich, sobald man über eine reellwertige bilineare nicht ausgeartete Abbildung
auf den Tangentialräumen verfügt.
Die Metrik ist eine solche Abbildung!
Ein Co-Tangentialvektor \(\omega(p)\) aus \(T^{*}(p)\) ordnet jedem
Tangentialvektor \(u(p)\) aus \(T(p)\) eine relle Zahl
\[
\omega(p) \, u(p)
\]
zu. Co-Tangentialvektoren sind ja lineare Abbildungen (Linearformen)
auf dem Tangentialraum mit Werten in den reellen Zahlen.
Die Metrik wiederum ordnet zwei Tangentialvektoren \(v(p)\) und \(u(p)\) aus \(T(p)\)
eine reelle Zahl zu. Die Idee ist nun die folgende:
Identifikation von Tangential- und Co-Tangentialvektoren über die Metrik:
Einem Tangentialvektor \(v(p)\) ordnet man denjenigen Co-Tangentialvektor
(nennen wir ihn \( g_{*}(v(p)) \) )
zu, der angewendet auf alle \(u(p)\) aus \(T(p)\) den Wert der Metrik von \(v(p)\) mit \(u(p)\)
ergibt:
\[
[g_{*}(v(p))] \, u(p) := g(v(p), u(p))
\]
Diese Definition der Abbildung \(g_{*}\) ist koordinatenunabhängig!
In Koordinaten wollen wir die folgende Schreibweise verwenden:
\[
g_{*}(v(p)) =:
\sum_{\mu} \, v_{\mu}(p) \, dx^{\mu} |_{p}
\]
Dadurch ist \( v_{\mu}(p) \) (mit Index unten) definiert.
Es gilt also:
\[
\sum_{\mu} \, v_{\mu}(p) \, u^{\mu}(p)
=
\sum_{\nu\mu} \, v^{\nu}(p) \, g_{\nu\mu}(p) \, u^{\mu}(p)
\]
Da diese Gleichung für alle \(u^{\mu}(p)\) gelten soll, folgt:
\[
v_{\mu}(p)
=
\sum_{\nu} \, v^{\nu}(p) \, g_{\nu\mu}(p)
\]
Damit sieht man, dass die Abbildung \(g_{*}\) eindeutig definiert ist.
Man bezeichnet dies als Herunterziehen der Indices (das ist der Grund dafür,
warum wir den Stern bei \(g_{*}\) unten geschrieben haben:
\(g_{*}\) zieht bei den Komponenten den Index herunter)!
Man kann sich den Co-Tangentialvektor \( g_{*}(v(p)) \) gleichsam als
die linke Seite der Metrik vorstellen.
In der Quantentheorie
(in der an die Stelle der Metrik ein Skalarprodukt auf einem unendlich-dimensionalen Vektorraum
tritt) macht man diese Idee durch Diracs Bra-Ket-Schreibweise besonders
deutlich (siehe Die Symmetrie der Naturgesetze, Kapitel 4.5
Das mathematische Gerüst der Quantentheorie ): Das Skalarprodukt schreibt man dort
als
\[
\langle u | v \rangle
\]
und man schreibt
\[
| v \rangle
\]
für den Vektor und
\[
\langle u |
\]
für den Co-Vektor, der zum Vektor \(| u \rangle \) gehört. Nun liefert
\( \langle u | \)
angewendet auf \( | v \rangle \)
einfach \( \langle u | v \rangle \), d.h. man kann den Co-Vektor \( \langle u | \)
gleichsam als linken Teil des Skalarproduktes
\( \langle u | v \rangle \)
auffassen.
Noch einige Bemerkungen zum Gradienten:
Im euklidischen Einbettungsraum mit euklidischen Koordinaten \(x^{\mu}\)
definiert man den Gradienten
einer skalaren Funktion \(\phi\) einfach durch den Vektor mit den
Komponenten
\[
\mathrm{grad} \, \phi :=
\frac{\partial \phi}{\partial x^{\mu}}
\]
Für die Richtungsableitung entlang einer Kurve \(\gamma\)
gilt:
\[
\frac{d}{dt} \phi(\gamma(t)) =
\]
\[
= \sum_{\mu} \, \frac{\partial \phi}{\partial x^{\mu}} \,
\frac{d\gamma^{\mu}}{dt}
=
\]
\[ =
\left\langle \mathrm{grad} \, \phi \, , \, \frac{d}{dt} \gamma \right\rangle
\]
Nun gilt die erste Gleichung genau in dieser Form auch dann, wenn die Koordinaten \(x^{\mu}\)
krummlinige Koordinaten sind, denn diese Gleichung repräsentiert dann einfach die Kettenregel.
Wenn \( \mathrm{grad} \, \phi \) ein Tangentialvektor sein soll
(nur dann macht das Skalarprodukt oben Sinn, wenn wir es durch die Metrik ersetzen)
sind seine Komponenten
definiert durch die Gleichung
\[
\mathrm{grad} \, \phi =
\sum_{\mu} \, (\mathrm{grad} \, \phi)^{\mu} \, \frac{\partial \boldsymbol{X}}{\partial x^{\mu}}
\]
Diese Komponenten \( (\mathrm{grad} \, \phi)^{\mu} \) sind aber in krummlinigen Koordinaten
nicht mehr unbedingt gleich \( \frac{\partial \phi}{\partial x^{\mu}} \).
Es gilt vielmehr
\[
\sum_{\mu} \, \frac{\partial \phi}{\partial x^{\mu}} \,
\frac{d\gamma^{\mu}}{dt}
=
\]
\[ =
\left\langle \mathrm{grad} \, \phi \, , \, \frac{d}{dt} \gamma \right\rangle
\]
\[
=
\sum_{\nu\mu} \, (\mathrm{grad} \, \phi)^{\nu} \,
\frac{d\gamma^{\mu}}{dt} \,
\left\langle \frac{\partial \boldsymbol{X}}{\partial x^{\nu}} \, ,
\, \frac{\partial \boldsymbol{X}}{\partial x^{\mu}} \right\rangle
\]
wobei \( \boldsymbol{X} \) einfach der von den Koordinaten \(x\) abhängige Vektor im
Einbettungsraum \(\mathbb{R}^{n}\) ist.
Schreiben wir wieder
\[
\left\langle \frac{\partial \boldsymbol{X}}{\partial x^{\nu}} \, ,
\, \frac{\partial \boldsymbol{X}}{\partial x^{\mu}} \right\rangle
=:
g_{\nu\mu}
\]
so haben wir also
\[
\frac{\partial \phi}{\partial x^{\mu}} =
\sum_{\nu} \, (\mathrm{grad} \, \phi)^{\nu} \,
g_{\nu\mu}
\]
oder mit Hilfe der inversen metrischen Matrix (Indizes dann oben)
\[
(\mathrm{grad} \, \phi)^{\nu} =
\sum_{\mu} \, g^{\nu\mu} \, \frac{\partial \phi}{\partial x^{\mu}}
\]
Auf diese Weise kann man beispielsweise den Gradienten in Kugelkoordinaten
im \( \mathbb{R}^{3} \) ausrechnen – das Ergebnis findet man in vielen
mathematischen Formelsammlungen.
All dies lässt sich direkt auf eine Mannigfaltigkeit übertragen:
Man definiert zunächst die Gradienten-1-Form von \( \phi \) einfach
als
\[
d\phi = \sum_{\mu} \,
\frac{\partial \phi}{\partial x^{\mu}}
\, dx^{\mu}
\]
(das kennen wir schon aus Kapitel 5
Co-Tangentialräume und Differentialformen, wobei wir die Koordinatenfunktion \(f\)
nicht explizit mitschreiben).
Nun kann man diesem Co-Tangentialvektor
durch die Umkehr-Abbildung von \(g_{*}\), die wir mit
\(g^{*}\) bezeichnen wollen (da sie den Index hochzieht),
den Gradientenvektor
\[
\mathrm{grad} \, \phi := g^{*}(d\phi)
\]
zuordnen. Zur Verdeutlichung: \(g^{*}\) erfüllt die Bedingung
\[
\omega(p) \, u(p) =: g\big( \, g^{*}(\omega(p)) \, , \, u(p) \, \big)
\]
In Komponenten ist dann
\[
\mathrm{grad} \, \phi =
\sum_{\nu}
\, (\mathrm{grad} \, \phi)^{\nu} \frac{\partial}{\partial x^{\nu}}
\]
mit
\[
(\mathrm{grad} \, \phi)^{\nu} =
\sum_{\mu} \, g^{\nu\mu} \, \frac{\partial \phi}{\partial x^{\mu}}
\]
Bemerkungen über Symplektische Geometrie und Hamiltonsche Mechanik
Die Metrik haben wir oben als symmetrische bilineare nicht-ausgeartete Abbildung
auf den Tangentialvektoren eingeführt. Man kann sich natürlich fragen,
ob es nicht noch andere Abbildungen (Tensoren) gibt, die man auf den Tangential- und
Co-Tangentialvektoren einer Mannigfaltigkeit definieren kann, und die
weitere nützliche Strukturen dort bilden. Wie wäre es beispielsweise
statt einer symmetrischen mit einer antisymmetrischen bilinearen Abbildung?
Es gibt viele Beispiele für solche nützlichen Abbildungen,
und ich möchte zum Abschluss dieses Kapitels eine spezielle
davon als Beispiel herausgreifen: die symplektische 2-Form \(\omega\)
(hat nichts mit dem oben verwendeten Co-Tangentialvektor zu tun;
weitere Infos siehe z.B.
Wikipedia: Symplectic geometry).
Diese 2-Form ist wie die Metrik einfach eine bilineare, nicht ausgeartete
Abbildung von den Tangentialräumen in die reellen Zahlen.
Der wichtigste Unterschied zur Metrik ist, dass \(\omega\) antisymmetrisch
ist, d.h.
\[
\omega(u,v) = - \omega(v,u)
\]
Außerdem fordert man noch, dass \(\omega\) geschlossen ist, d.h.
\[
d\omega = 0
\]
(wir wollen darauf hier nicht genauer eingehen – ein Analogon bei Vektoren wäre die Forderung,
dass die Divergenz eines Vektorfeldes verschwindet).
Wie oben bei der Metrik kann man auch die symplektische 2-Form
dazu verwenden, um eine Abbildung zwischen Tangential- und Co-Tangentialvektoren
zu definieren. Man ersetzt dazu in den Formeln oben einfach überall \(g\) durch \(\omega\).
Für eine skalare Funktion \(\phi\) kann man dann auch das Analogon zum Gradienten definieren:
\[
d\phi(p) \, u(p) =: \omega \big( \, \omega^{*}(d\phi(p)) \, , \, u(p) \big)
\]
Mit Hilfe der symplektischen 2-Form kann man beispielsweise die
Hamiltonsche Mechanik in eine geometrische Sprache übersetzen
(Details zur Hamiltonschen Mechanik findet man in
Quantenfeldtheorie und Eichfelder, Kapitel 3:
Die Quantisierung der klassischen Mechanik ).
Dabei setzt man für \(\phi\) die Hamilton-Funktion \(H\) ein. Man schreibt dabei
auch gerne
\[
dH \, u =: \omega( v_{H}, u )
\]
mit
\[
v_{H} := \omega^{*}(dH)
\]
(den Punkt \(p\) haben wir hier überall zur Vereinfachung weggelassen,
damit wir inh nicht gleich mit dem Impuls verwechseln).
\( v_{H} \) wird auch als Hamiltonsches Vektorfeld bezeichnet.
Wir wollen das Beispiel der Hamiltonschen Mechanik noch etwas weiter
verfolgen.
Dazu stellen wir uns ein System mit \(n\) räumlichen Freiheitsgraden vor,
z.B. die Bewegung eines Teilchens im dreidimensionalen Raum (dann wäre \(n = 3\)).
Die \(n\) Koordinaten, mit denen wir die Bewegung beschreiben wollen, nennen wir
\(q^{i}\) (das können z.B. die Teilchenorte Kugelkoordinaten sein).
In der Hamiltonschen Mechanik kommen zu diesen
\(n\) räumlichen Koordinaten noch \(n\) kanonisch konjugierte Impulskoordinaten
\(p_{i}\) hinzu (nicht mit dem Punkt \(p\) auf der Mannigfaltigkeit verwechseln).
Den (hier lateinischen) Index \(i\) schreiben wir dabei unten, um anzudeuten, dass
sich bei einer Koordinatentransformation der Ortskoordinaten \(q^{i}\)
die zugeordneten Impulskoordinaten \(p_{i}\) umgekehrt zu den räumlichen Geschwindigkeiten transformieren.
Eine Bewegung wird in der Hamiltonschen Mechanik durch eine Kurve im Phasenraum
beschrieben. Die Koordinaten im Phasenraum sind dabei die \(q^{i}\)
sowie die \(p_{i}\), d.h. der Phasenraum ist \(2n\)-dimensional
(bei einem Teilchen im dreidimensionalen Raum wäre der Phasenraum also 6-dimensional).
Der Koordinatenvektor eines Punktes im Phasenraum lautet also
\[
x = (x^{\mu}) =
\begin{pmatrix}
x^1 \\
... \\
x^{2n} \\
\end{pmatrix}
=
\begin{pmatrix}
q^1 \\
... \\
q^n \\
p_1 \\
... \\
p_n
\end{pmatrix}
=:
\begin{pmatrix}
q \\
p
\end{pmatrix}
\]
Anmerkung: Der griechische Index \(\mu\) bei \(x^\mu\) läuft bis \(2n\) und wird wie bisher bei Koordinaten
oben geschrieben. Bei den Impulsen schreiben wir den lateinischen Index \(i\) (der von \(1\) bis \(n\) läuft)
jedoch unten.
Die symplektische 2-Form \(\omega\) ist nun in der Hamiltonschen Mechanik definiert durch
\[
\omega := \sum_{i = 1}^{n} \, dq^{i} \wedge dp_{i}
\]
in Analogie zur Schreibweise
\[
g =
\sum_{\mu\nu} \, g_{\mu\nu} \, dx^{\mu} \otimes dx^{\nu}
\]
von oben für die Metrik. Das antisymmetrische Dachprodukt \( \wedge \) hatten wir weiter oben bereits
besprochen; Details siehe Kapitel 8:
Krümmung .
Nun können wir das Hamiltonsche Vektorfeld
\[
v_{H} = \omega^{*}(dH)
\]
explizit ausrechnen. Nach Definition muss nämlich gelten:
\[
dH \, u = \omega( v_{H}, u )
\]
für alle Tangentialvektoren \(u\). Rechnen wir beide Seiten aus, wobei wir \(H\) direkt als
Funktion der Koordinaten ansehen: \(H(x)\) oder auch \(H(q,p)\).
Die linke Seite der obigen Gleichung lautet dann:
\[
dH \, u
= \sum_{\mu = 1}^{2n} \,
\frac{\partial H}{\partial x^{\mu}} \, u^{\mu} =
\]
\[
= \sum_{i = 1}^n \,
\left( \frac{\partial H}{\partial q^{i}} \, u^{i} + \frac{\partial H}{\partial p_{i}} \, u^{i + n} \right)
\]
Für die rechte Seite haben wir
\[
\omega( v_{H}, u )
=
\sum_{i = 1}^n \,
\left[dq^{i} \wedge dp_{i}\right] ( v_{H}, u )
=
\]
\[
\sum_{i = 1}^n \,
\left( v_{H}^{i} \, u^{i + n}
- u^{i} \, v_{H}^{i + n} \right)
\]
Da linke und rechte Seite für alle \(u\) gleich sein müssen, haben wir also
\[
v_{H}^{i} = [\omega^{*}(dH)]^{i}
= \frac{\partial H}{\partial p_{i}}
\]
\[
v_{H}^{i + n} = [\omega^{*}(dH)]^{i + n}
= - \frac{\partial H}{\partial q^{i}}
\]
in Analogie zu unserer Gradientenformel
\[
(\mathrm{grad} \, \phi)^{\nu} =
\sum_{\mu} \, g^{\nu\mu} \, \frac{\partial \phi}{\partial x^{\mu}}
\]
von oben!
Dies kann man nun dazu verwenden, um die Hamiltonschen Bewegungsgleichungen
aufzuschreiben. Wir betrachten dazu eine Kurve \(\gamma(t)\) im Phasenraum, die die Bewegung
beschreibt. Die Koordinaten dieser Kurve schreiben wir einfach als
\(q^{i}(t)\) und \(p_{i}(t)\). Die Hamiltonschen Bewegungsgleichungen
lauten
\[
\frac{d}{dt} q^{i}(t) = \frac{\partial H}{\partial p_{i}}
= v_{H}^{i}
\]
\[
\frac{d}{dt} p_{i}(t) = - \frac{\partial H}{\partial q^{i}}
= v_{H}^{i + n}
\]
oder zusammengefasst
\[
\frac{d}{dt} x^{\mu}(t) = v_{H}^{\mu}
\]
Das Hamiltonsche Vektorfeld liefert also gleichsam das Geschwindigkeitsfeld
für die Bewegungskurven im Phasenraum.
Man kann hier noch tiefer in die geometrische Formulierung der Hamiltonschen
Mechanik einsteigen und beispielsweise Poissonklammern mit Hilfe
von \(\omega\) definieren (schauen Sie sich gerne einmal Ausdrücke wie
\(\omega(v_{f} , v_{g}) \) oder auch \( v_{g} \, f \)
an mit skalaren Funktionen \(f\) und \(g\) auf dem Phasenraum analog zu \(H\)).
Weiter kann man Koordinaten-Transformationen
im Phasenraum untersuchen, unter denen die symplektische Form \(\omega\) invariant ist.
Diese Transformationen nennt man kanonische Transformationen.
Ziel ist es dabei, die Hamiltonschen Bewegungsgleichungen in eine möglichst einfache
Form zu bringen. Wir wollen aber in diesem Kapitel nicht weiter darauf
eingehen, da dies unseren Rahmen sprengen würde.
Im nächsten Kapitel werden wir bei der Lie-Ableitung noch
einmal kurz auf die Hamiltonsche Mechanik zurückkommen.
{kind=link}